|
Jeric Lew Hello, I'm Jeric! I currently pursing a Masters of Engineering by research and I'm incredibly lucky to be advised by Professor Guillaume Sartoretti @ MARMot Lab, National University of Singapore (NUS). I recently completed my Bachelor of Engineering in Mechanical @ NUS, and was also advised by Professor Sartoretti for my undergraduate thesis on diffusion models for autonomous robot exploration. I am actively seeking PhD opportunities around the world that are relevant to Robot Learning! |

|
ResearchMy research interest is in the intersection of robotics, computer vision and machine learning to develop robots that can reason about their surroundings and other agents (robots or humans) to complete difficult tasks like autonomous exploration, off-road navigation, and manipulation alone or in teams. I believe that this line of research (robot learning) will lead to capable and adaptable robots that can propel robotics applications in the real world. Currently, I am working on learning strategies for multi-robot systems to improve coordination and task efficiency. In Summer 2024, I was working on off-road navigation as a Research Intern @ Carnegie Mellon University's (CMU) Robotics Institute as a part of CMU's Robotics Institute Summer Scholars (RISS) program, under the supervision of Professor Sebastian Scherer and Dr. Wenshan Wang. |
Selected Publications(* indicates equal contribution) |
|
AID: Agent Intent from Diffusion for Multi-Agent Informative Path Planning
Jeric Lew, Yuhong Cao, Derek Ming Siang Tan, Guillaume Sartoretti arXiv, 2025 arXiv / code / bibtex Multi-agent coordination by sharing diffusion-model generated long-horizon planned paths with online fine-tuning (DPPO) |
|
DARE: Diffusion Policy for Autonomous Robot Exploration
Yuhong Cao*, Jeric Lew*, Jingsong Liang, Jin Cheng, Guillaume Sartoretti IEEE International Conference on Robotics and Automation (ICRA), 2025 arXiv / video / code / bibtex Diffusion models for improved autonomous robot exploration by predicting explicit long-term trajectories into unknown areas hence implicitly reasoning about unknown spatial structure. |
|
SALON: Self-supervised Adaptive Learning for Off-road Navigation
Matthew Sivaprakasam, Samuel Triest, Cherie Ho, Shubhra Aich, Jeric Lew, Isaiah Adu, Wenshan Wang, Sebastian Scherer IEEE International Conference on Robotics and Automation (ICRA), 2025 arXiv / project / video / code / bibtex Perception-action framework for robust off-road navigation that enables fast adaptation of traversability estimates through learning online. |
|
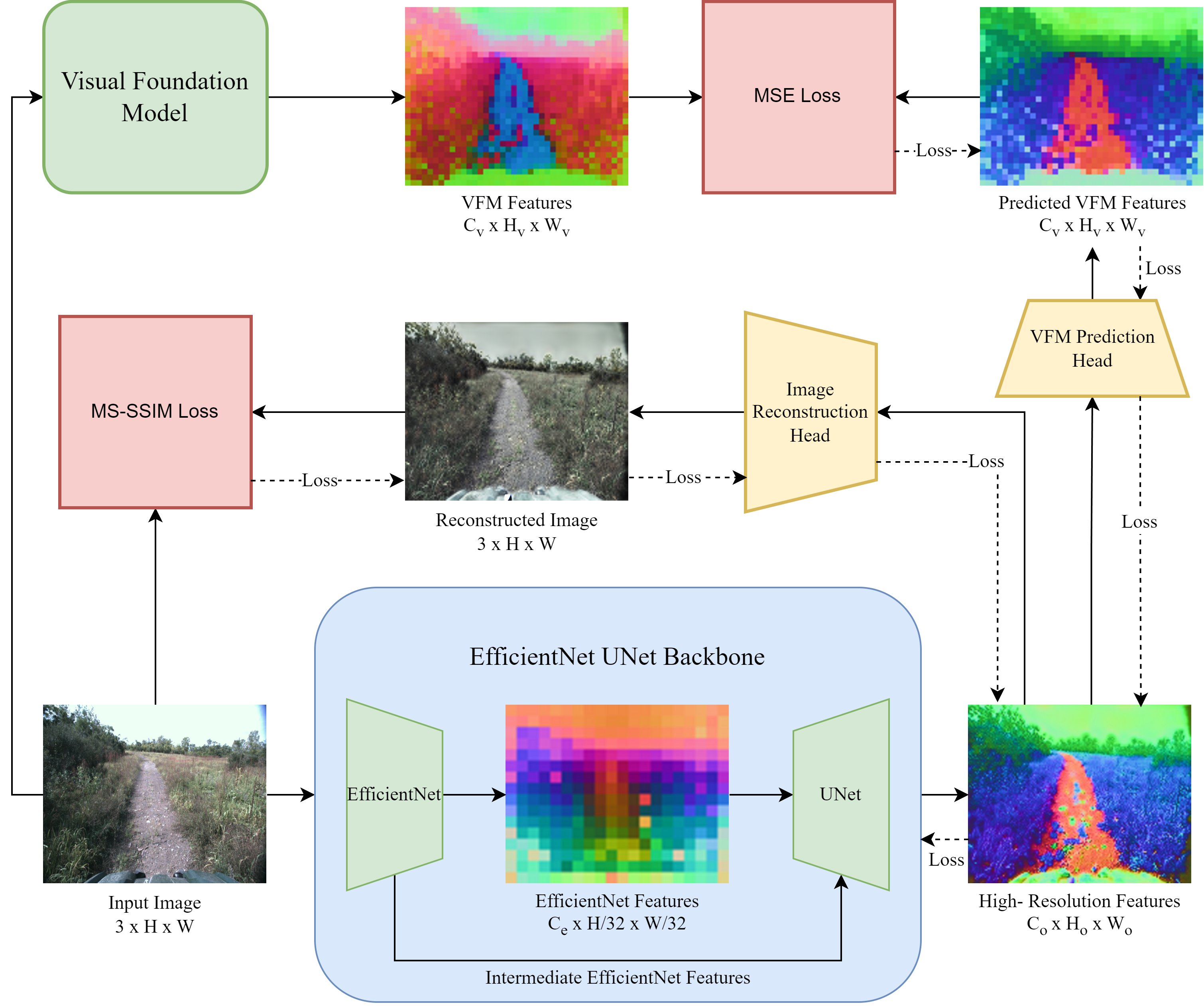
SHRED: Swift High-Resolution features via Efficient Distillation
Jeric Lew, Matthew Sivaprakasam, Samuel Triest, Wenshan Wang, Sebastian Scherer RISS Working Papers Journal, 2024 poster / video A knowledge distillation framework trains a faster, high-resolution CNN-based image encoder with capabilities comparable to ViT-based models, meant for real-time off-road navigation. |
|
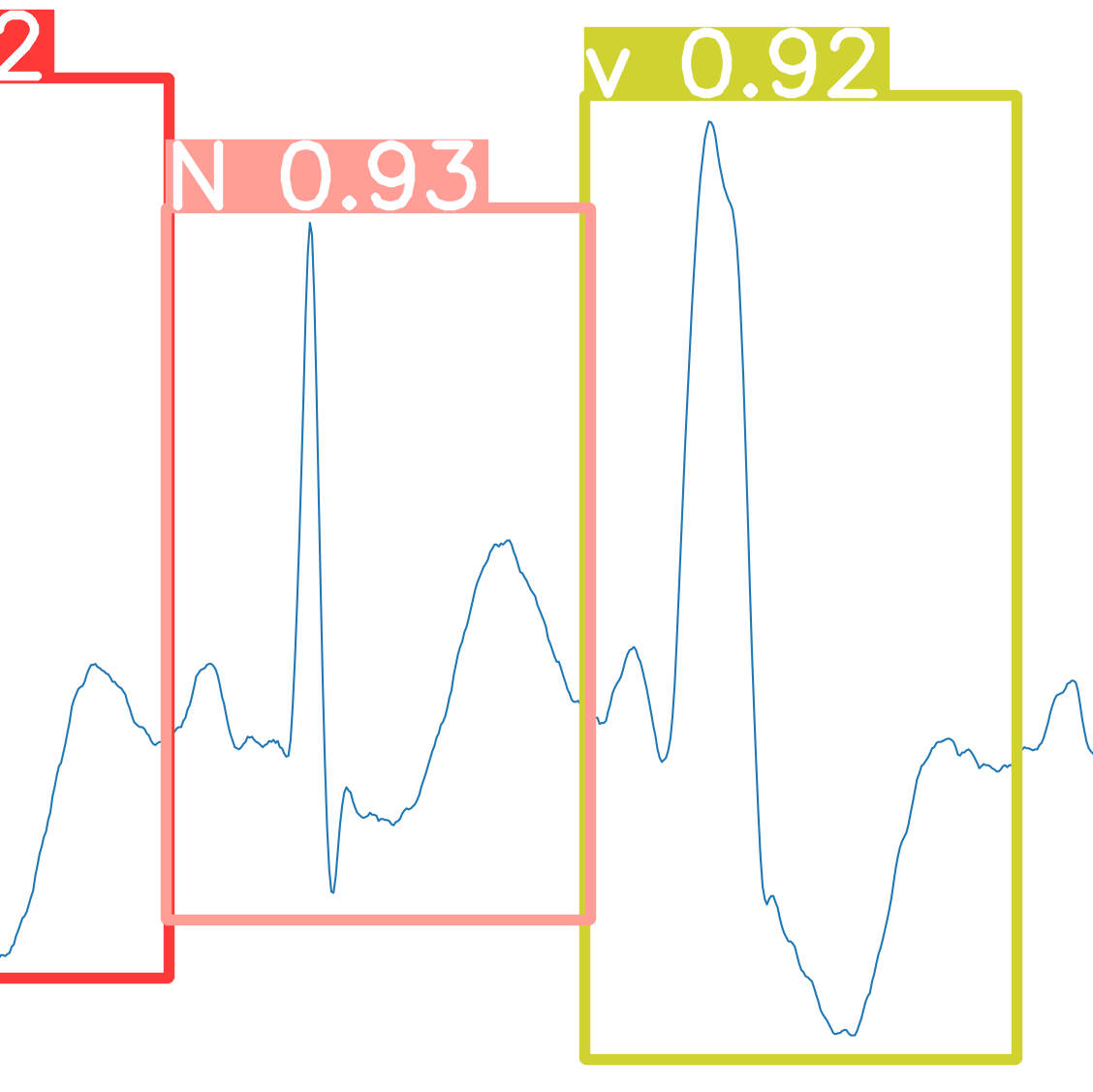
A Novel real-time arrhythmia detection model using YOLOv8
Guang Jun Nicholas Ang, Aritejh Kr Goil, Henryk Chan, Jeric Lew, Xin Chun Lee, Raihan Bin, Ahmad Mustaffa, Timotius Jason, Ze Ting Woon, Bingquan Shen arXiv, 2023 arXiv / bibtex Real-time arrhythmia detection using a loss-modified YOLOv8-based model on single-lead ECG signals achieves 99.5% accuracy for home-based cardiac monitoring. |
Teaching |
Industry Experience |
|
Website template from Jon Barron |